
Ensenso 3D操作
人工智能激光点三角测量的原理是什么?
利用结构化光线看到三维世界
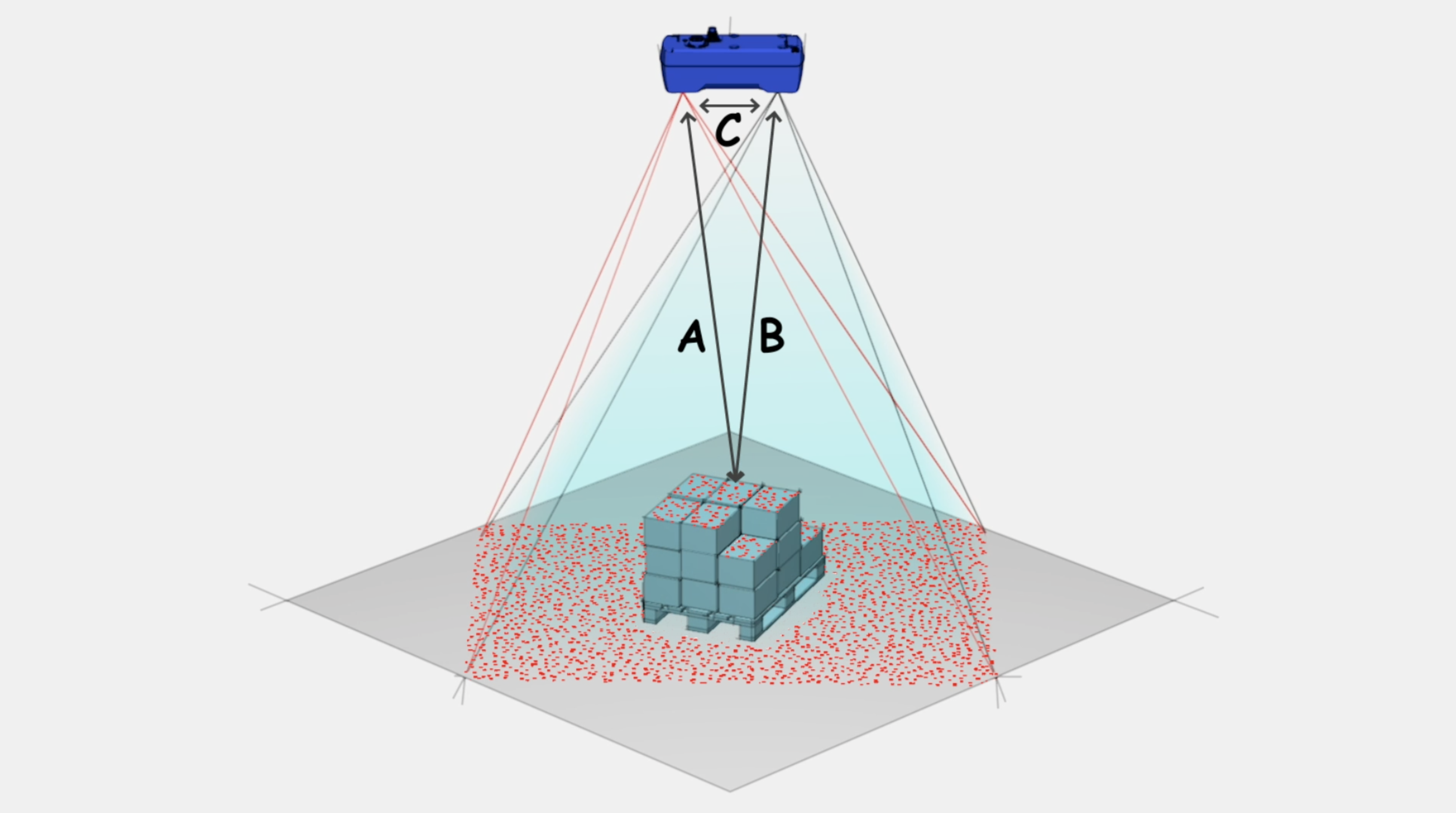
Ensenso S系列相机使用结构化光线。红外线激光投射随机点阵图案到物体空间上,由位置稍有不同的相机记录下来。 但因物体反射光线点不同,点阵图案图像亦不同。因物体与光源距离有远近,对应的激光图像点也会偏离其预期位置。这些点位置的偏移变构成了深度信息的基础。
与同样基于激光的LiDAR或飞行时间(ToF)这类3D技术不同,每个捕捉的投影点与其形成的点云的空间深度不是来自测量光线延时,而是利用Ensenso Stereo Vision相机采用的三角测量法。
与Stereo Vision一样,该计算方法基于观察角度不同带来的激光点位置偏离(“差异”)。但Ensenso S系列相机仅采用一个相机记录物体空间。如何能从单相机的投影图案图像中提取点的位置区别呢?
投影仪本身就提供了必要的信息。所谓的DOE投影(衍射光学)能够生成固定的“点图像”,进而获取点位置。获得两张点图像的距离和观察角后,Ensenso软件三角测量程序能够确定每个(可见)激光点的3D坐标。
结构化光线
红外线激光会投射固定图案的光点到物体空间中。使用了所谓的衍射光学(DOE)创造点图案。其精密的微结构能够确保针对性的激光分离和衍射,创造出想要的光分布。
DOE使光的分布密度均匀,同时确保光束能量发射几乎无损耗。与窄带激光结合在一起,即使在低环境光照情况下,也能创造较高对比度点阵图案。
人工智能加速的点匹配
要使用三角测量计算深度信息,必须先针对每个投影点确定其对应的图像点。但当预期点的位置因物体上的光反射而偏移,在众多点中辨识一个点对基于规则的图像处理算法来说是个不小的挑战。而解决这一挑战的关键在于“人工智能”。
哪种技术更适合辨识与分类存在无数变种的特征呢?Ensenso软件因而使用了人工智能网络(KNN)来识别相机图像中的点。该网络预先针对所用图案的倾斜和变形进行了训练。
使用人工智能激光点阵图案三角测量的优势
深度精度高
人工智能网络点匹配成功率更高,3D数据因而强健且几何学上准确,深度精度更高
可用于低光照环境
使用红外线照明,在低环境光照条件下仍可正常运行
快速捕捉
由于只需要处理一对图像,图像采集与评估更快速

人工智能加速
使用人工智能加速,每秒最多可产生20朵点云

无动态模糊
曝光时间短、激光发射量高,尤其适合移动物体图像捕捉且不会产生动态模糊
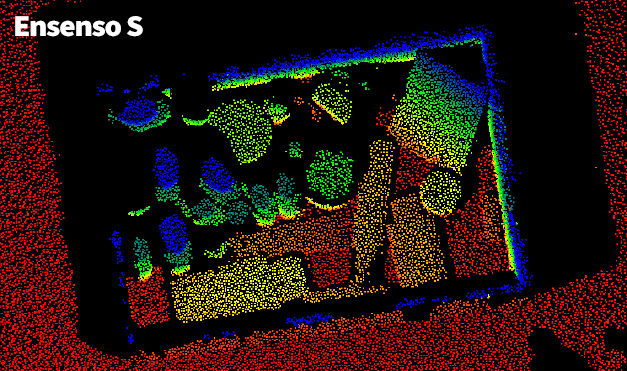
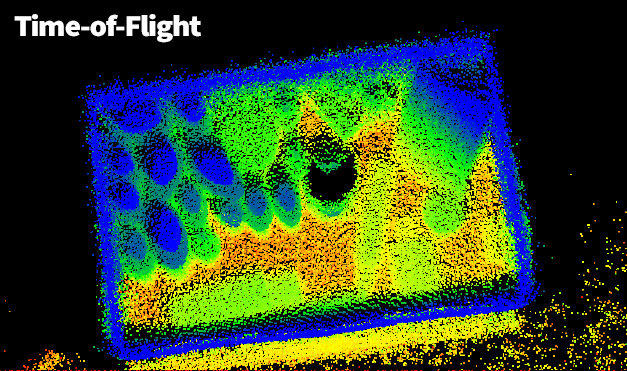
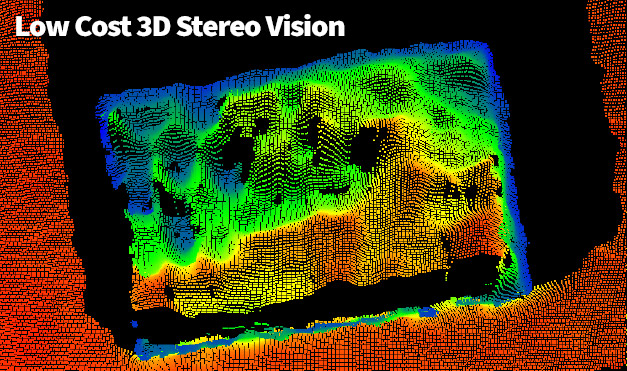
(*) 相比使用飞行时间(ToF)或低成本3D空间视觉技术的相机,Ensenso S10相机能够生成几何学上精确、深度精度高的3D数据。
ENSENSO 选择器
Ensenso相机选择器可帮助您轻松选择部件。输入您的工作环境后,在线配置程序会根据您的应用场合推荐最适合您的Ensenso系统。


