IDS NXT 2.5版本说明
介绍
这些版本说明描述了IDS NXT 2.5程序的新功能和变更。此次发布包括以下组件:
IDS lighthouse 2.5
您可以直接在IDS lighthouse中找到IDS lighthouse版本说明:https://ids-lighthouse.ai/login/
IDS NXT OS 1.4.0
您可以在IDS NXT OS 1.4.0版本说明中找到IDS NXT OS 1.4.0版本说明
IDS NXT cockpit 2.4.0
此IDS NXT cockpit版本支持Windows 10 64位(21H1、20H2、2004和1909版本)操作系统。
注意:IDS NXT cockpit 2.4不能用于操作IDS NXT vegas相机。IDS NXT vegas系列相机适合使用IDS NXT Cockpit 1.2.4。
新增及变更功能
- 新相机功能:借助IDS NXT cockpit 2.4.0,我们扩展了现有的相机参数。从现在开始,我们会为您提供除已有功能外的新相机参数(先决条件:必须在相机上安装IDS NXT OS 1.4.0或更高版本)。这些参数为:
- 2x2和4x4像素融合
- 伽马校正(在扩展的增益设置中)
- 您可以直接在新“传感器ROI”区域的传感器上限制图像。这就表示相机只会读取和处理指定的图像细节,从而占用更少内存,处理速度更快。
- 例如,如果您想要检查旋转对称物体,请使用线阵扫描模式。或者,您可以使用线阵扫描模式连续捕捉旋转物体的狭窄区域。IDS相机会直接合并这些区域,生成图像。凭借线阵扫描模式,您可以让检测试样内部一览无遗,例如,可将其显示为二维图像。借助视觉应用程序,您可以直接在相机上分析此图像。
- 您可以使用备份功能创建备份,保存相机数据。也可以加载备份文件至相同的IDS NXT相机,将您安装的应用程序和配置转移到其他IDS NXT相机。
一般性能改进
- 修复了在IDS NXT cockpit持续运行过程中,导致主内存中负载过大的内存泄漏问题。
- 加快了相机固件升级速度。
- 在VApp Manager中显示了视觉应用程序的内存使用率。
- 当上传或下载文件时,在图形界面中添加了进度条。
- 通过在文件路径中使用“.”,修复了无法保存图像的错误(点).
视觉应用程序
Object Detector 2.0.4
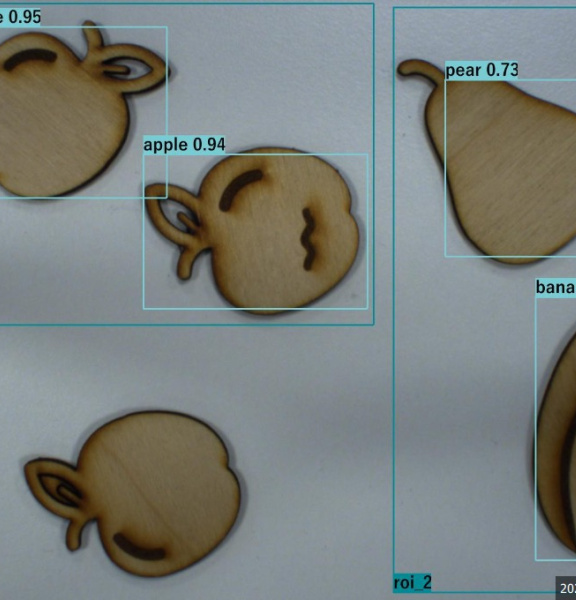
- 您可以在物体检测应用程序中定义一个或多个ROI。在这些ROI中,任何位置的物体都可通过检测识别。
- 改进了通过REST接口输出的结果以代表ROI。
- 添加了ROI相关信息至结果XML文件。让您能够通过FTP,与图像一起传输结果XML文件。
- 修复了可能会在切换CNN后导致结果不正确的错误。
Classifier 1.3.10
- 针对相机的“像素融合”功能,升级了视觉应用程序,因此启动像素融合时,相机会自动更新已设的ROI。
CNN Evaluator 2.4.7
- 修复了无法从Microsoft Edge上的视觉应用程序网页下载JSON文件的错误。
OPC UA Server 1.3.0
- 支持新的相机功能:合并读出、伽马校正、传感器ROI和线扫描模式。前提条件:相机安装了IDS NXT OS 1.4.0或更高版本。
IDS NXT Vision App Creator 1.4.0
- 升级IDS NXT API至版本2.4.0,因此您可以为IDS NXT OS 1.4.0编写视觉应用程序。
- 更新了视觉应用程序和插件模板,例如,视觉应用程序网页支持。
- 您可在GitHub上找到视觉应用程序的源代码示例:https://github.com/ids-imaging/ids-nxt-vision-app-examples
- 修复了一个错误,让您可使用Oracle Virtual Box 6.1.20或更高版本。
已知问题
| IDS NXT cockpit | 视觉应用程序“Crawler”不再可用。 | 由于IDS NXT cockpit 2.3及更高版本中已集成了Crawler应用程序,因此单独的视觉应用程序“Crawler”与IDS NXT cockpit 2.3.0或更高版本不再兼容。 |
| IDS NXT cockpit | IDS NXT cockpit显示两个Crawler图标。 | 如果在IDS NXT cockpit升级至2.3版本后,相机上仍显示安装了视觉应用程序“Crawler”,那么在IDS NXT cockpit中会显示2个Crawler图标。请卸载相机之前安装的视觉应用程序“Crawler”。 |
| IDS NXT cockpit | 图像翻转和ROI配置文件 | 如果您在创建ROI之后翻转图像,则ROI配置中不会正确保存这些ROI的位置。
|
| IDS NXT cockpit | 您可以使用IDS NXT cockpit和IDS peak进行混合操作 | 如果使用IDS peak进行混合操作,则在更新GUF文件时,卸载IDS peak或IDS NXT cockpit可能会导致出现复杂问题。卸载后,重新安装剩余的软件可以修复该问题。 |
| IDS NXT cockpit | 视觉应用程序和之前的ROI功能 | 如果相机的视觉应用程序仍使用之前的ROI功能,则切换像素融合后,ROI可能会显示错误的位置。 |
| IDS NXT OS | IDS NXT OS 1.0版本的IDS NXT相机 | 如果您仍然拥有使用IDS NXT OS 1.0版本的IDS NXT相机,并在硬件触发设置中设置了预分频器或延迟,则这些设置也会影响所有其他操作模式:
|
| IDS NXT OS | 在自由运行模式下实现最大帧率 | 为了在自由运行模式下实现最大帧率,由于性能原因,不应使用IDS NXT cockpit显示图像。 |
| IDS NXT OS | 视觉应用程序和传感器ROI | 极个别情况下,降低传感器ROI可能会导致视觉程序应用重启。 |
| Object Detector | 显示结果 | 结果图像中无法显示日语字符。 |
| Classifier | 显示结果 | 结果图像中无法显示日语字符。 |
| OPC UA Server | 新安装视觉应用程序 | 重新安装视觉应用程序后,可能需要两次调用“准备配方”方法以启用相应的配方。或者,重新安装视觉应用程序后,建议最初启动一次。 |
| OPC UA Server | 高亮显示结果 | 如果视觉应用程序使用格式化或“高亮显示”结果,则相机需要OPC UA 1.2.0或更高版本服务器。 |
| OPC UA Server | 多个ROI配置 | 多个ROI配置仅受OPC UA服务器1.2.0或更高版本支持。 |
| GPIO Gateway | 不支持CNN管理器2.1.4及更高版本 | 从2.1.4版本开始,CNN管理器视觉应用程序不再支持与GPIO Gateway视觉应用程序结合使用。 |
| CNN manager | 不支持IDS NXT OS 1.1及更高版本 | IDS NXT OS 1.1及更高版本中已停止使用CNN管理器视觉应用程序。对于安装IDS NXT OS 1.1或更高版本的相机,新增修订和改进的Classifier vision app代替了CNN manager。 |
| IDS NXT Vision App Creator | IDS NXT Vision App Creator升级 | 升级后,您必须重置项目备用“源文件夹”的设置。 |
| IDS NXT Vision App Creator | 更新虚拟机 | 升级过程中,虚拟机会被删除,然后被新的虚拟机替代。升级之前,您必须手动备份原有虚拟机上保存且将来会用到的文件。 |
| IDS NXT Vision App Creator | 卸载 | 安装IDS NXT Vision App Creator不需要管理员权限。如果您以管理员身份安装过IDS NXT Vision App Creator上一个版本,系统可能不会自动删除控制面板中的卸载条目。请转至“控制面板”→“程序和功能”,然后卸载IDS NXT Vision App Creator上一个版本。 |
| IDS NXT REST接口 | 身份验证不正确时返回值错误 | 如果通过IDS NXT REST接口的请求使用了不正确的身份验证,则请求将失败。这种情况下,偶尔无法返回相应的错误代码“401 Unauthorized”,而是返回其他错误代码,这些错误代码不能明确指示错误的身份验证。 之后的版本将修复这个错误。 |
状态:2022-02-17