Ensenso S系列相机
利用人工智能的3D激光点阵图案三角测量

红外线激光
人工智能驱动
深度精度高
外形紧凑
工业级质量
更加紧凑!
得益于这些优势,全新的Ensenso S系列能够通过人工智能加速,使用激光三角测量,生成强健的3D数据。得益于非传统3D技术,我们能够开发出超紧凑、高性价比的Ensenso S10相机。


价格更优惠!
在以往系统过于昂贵或尺寸过大的简单3D应用场景中,三维物体信息的优势终于可以得到利用。 提供Ensenso 软件开发工具包,Ensenso S系列能够为预算有限的项目带来工业级3D技术。

人工智能激光点阵三角测量
Ensenso S10使用基于结构化光线的3D方法。窄带红外线激光投影仪可生成高对比点阵图案,甚至能够投射到具有复杂表面的物体,工作距离高达3米。 人工智能能够将相机检测到的激光点阵可靠地映射到DOE投影的硬编码位置上。从而生成强健、深度精度高的3D数据。
稳定的工业级质量
紧凑的锌合金外壳防护等级达到IP 65/67,使用螺旋式接口,内部由钢质框架将3D部件固定在预校准好的位置,防止部件扭转。
该相机采用专门调节温控系统稳定激光温度,让激光持续以835纳米波长发射,确保输出波长的稳定性。由此实现的Z轴精度能确保一米距离的物体深度值最多偏差2.4毫米。

适用于各种应用场景
该款相机外壳与行业兼容、设计紧凑,视野可达60度,工作范围可达0.5到3米,因而适用于多种应用场景。 得益于主动红外线激光照明与红外线滤光片,该款相机在低环境光照条件下仍可照常工作。
精准迅速
160万像素索尼传感器捕捉的每张图像都可创造完整点云,深度点多达85,000个。主动激光照明确保在低曝光条件下依然可以捕捉图像,亦可测量快速移动物体,而不会产生动态模糊。由于投影仪可在满功率下以高分辨率运行,因此,可以实现每秒20点云。
一台相机,众多应用
物流自动化
3D数据让机器人能够处理在线零售、仓储与快递业务中涉及的多种对象。 检测、识别、安全拾取与放置到正确位置从而可以完全机器人自动化。
机器人视觉
3D 相机技术让机器人自适应地检测并分析环境,从而针对任何情景独立地做出反应。
障碍检测
机器人与无人机行动时,若要避免碰撞,3D环境数据必不可少。从3D场景模型中了解障碍物的大小和位置,可计算应对障碍策略,提供安全路径。
监测与园艺自动化
如今,利用现代化的技术,我们可以在温室内实现植物的栽培与培育。在这方面,3D视觉能够通过自动化移动式机器人,为栽培植物处理提供支持。
相机数据
型号 |
Ensenso S |
|---|---|
3D系统 |
使用基于人工智能的激光点阵图案三角测量构造结构化光线 |
投影 |
红外线LED激光(835纳米),约68,000个激光点 |
CMOS传感器 |
全局快门,160万像素 |
焦距 |
4毫米 |
工作距离 |
500到3000毫米 |
视角 |
水平60°x垂直50° |
Z轴精度 |
1米距离偏差2.4毫米 |
激光点间距 |
1米距离间距7.1毫米 |
每秒3D点云 |
至多20Hz |
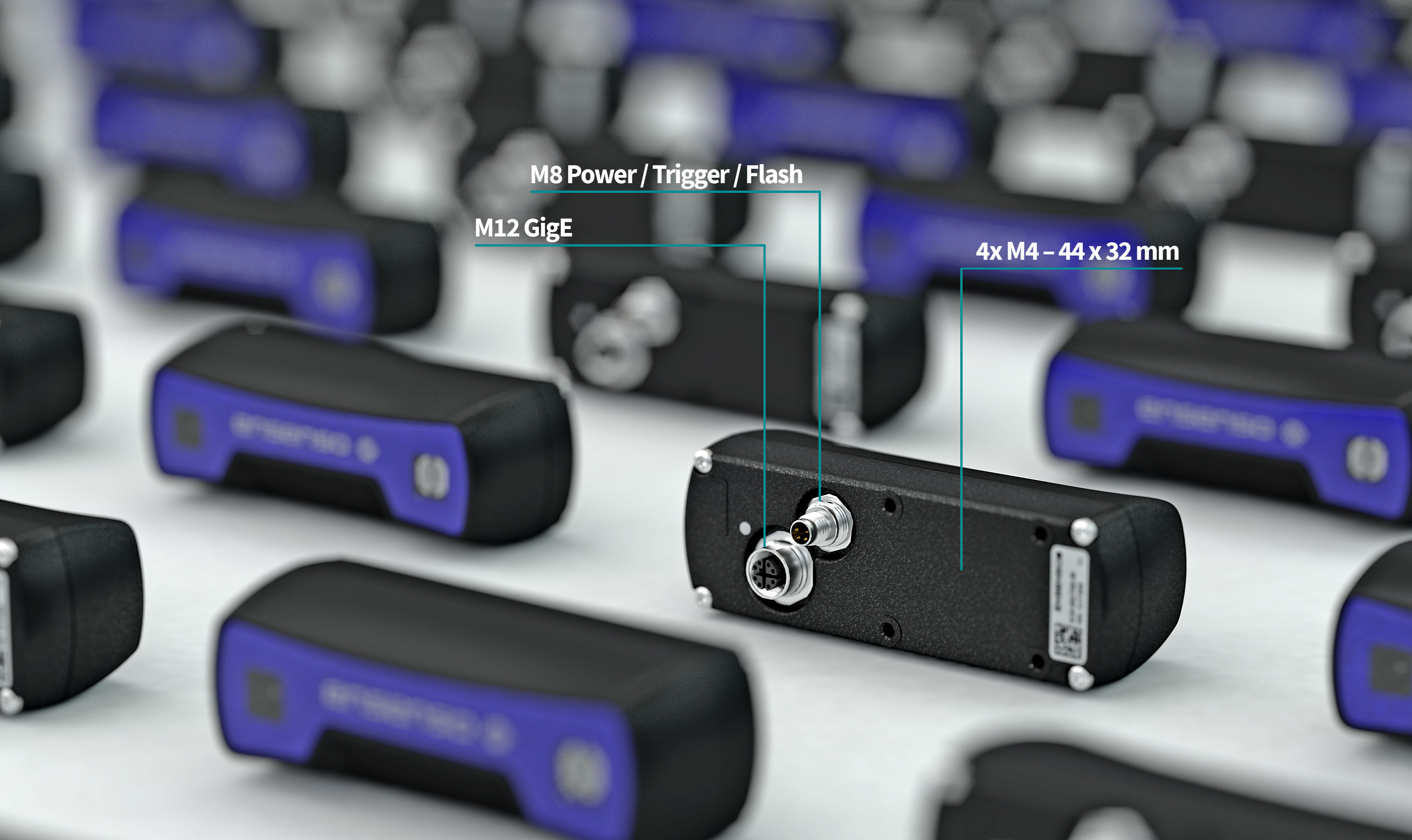
接口 |
M12 GigE数据端口、 |
电源 |
12到24V 直流/以太网供电 |
外壳 |
锌 |
防护等级 |
IP65/67 |
尺寸 |
130 x 45 x 44毫米 |
重量 |
565克 |
安装 |
背部4 x M4螺纹,矩形44 x 32毫米 |
Ensenso SDK
通过Ensenso SDK,Ensenso S相机系列的相机易于设置和操作。除了为3D相机提供易于设置的向导和相机校准支持外,它还包括基于GPU的图像处理,以实现更快的3D数据处理。
- 一个软件包(适用于Windows和Linux的Ensenso SDK),适用于所有Ensenso型号。
- MVTec HALCON, C, C++ 和 C# 示例程序,带源代码
- 输出单个3D点云,数据来自多相机模式下使用的所有相机
- 从多个视角实时构造3D点云
- 机器人手眼校准
- 例如,集成uEye工业相机,以捕获额外的颜色信息或条形码。
随着Ensenso SDK 3.3发布,您还可以使用Ensenso PartFinder根据自己的CAD几何图形在三维点云中定位对象。使用此软件模块需要单独的许可证。本视频介绍了此工具的功能,以及它为您的应用带来的优势。
Ensenso 选择器
Ensenso相机选择器可帮助您轻松选择部件。输入您的工作环境后,在线配置程序会根据您的应用场合推荐最适合您的Ensenso系统。


