Ensenso SDK 单一软件本版对应所有的Ensenso 3D 相机
免费的Ensenso SDK为所有Ensenso 3D立体摄像机提供了统一的接口。
Ensenso PartFinder
Ensenso PartFinder允许您加载自己的CAD几何图形,并在Ensenso 3D相机的点云中定位这些图形。它可以综合使用深度信息、表面法线和纹理数据,因此可以解决棘手的定位任务。普通NxLib中包含了PartFinder功能,不过需要单独的许可证才能使用。我们在这一Tencent 会话中向您详细介绍了此功能。

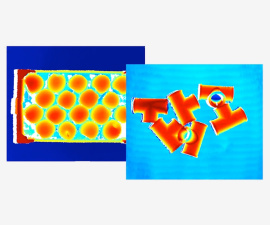
半全局立体匹配
高度并行的半全局立体匹配保证每个XYZ轴的高密度,高品质的深度影像。

Workspace 校正
透过Ensenso校準板轻松定义工作区(workspace)坐标系

虚拟视图Virtual Views
具有固定像素大小以及方向的远心高度图能够简化处理过程。

手眼校正
移动校正以及固定相机至六轴关节机械手臂

原始配件
从点云数据中得到几何物体像是阶层,球体,圆柱体等。

图案测量
準确的测量校正板的位置至Micrometer以及即时旋转。

以JSON为基础的API
使用基於JSON,C,C++以及C#,结构的面向对象且容易扩充的API。

远程连接
透过DLL接口或是TCP远端API访问,轻松地交换你的进程或是数据配置。

Multi-View
结合复数立体视觉相机做同步单一拍摄来制作纹理点云图。

Scene Rendering(场景渲染)
从复数相机撷取的3D视觉化的纹理表面

PatchMatch 立体匹配
用于查找不同图像部分之间对应关系的随机算法可在一次运行中实现整个工作空间的立体匹配(可选择是否与FlexView一起使用)
NxView
NxView是一个含有源代码的示例程序,演示了NxLib的主要功能。它可以打开一个或多个立体或彩色相机,并可将捕获的纹理以及深度信息可视化。曝光时间,binning,AOI,以及立体匹配等参数可以交互调整。
NxLib
NxLib 是我们SDK主要的核心Library。包含了立体匹配演算法,校正以及处里的功能。
HALCON 接口
借由使用HALCON的影像撷取接口以及Ensenso 可以轻松的被集成到HALCON跟Hdevelp。
范例程序
HDevelop Scripts 以及 numerous C, C++ 跟 C#示例程序让NxLib API更容易使用。